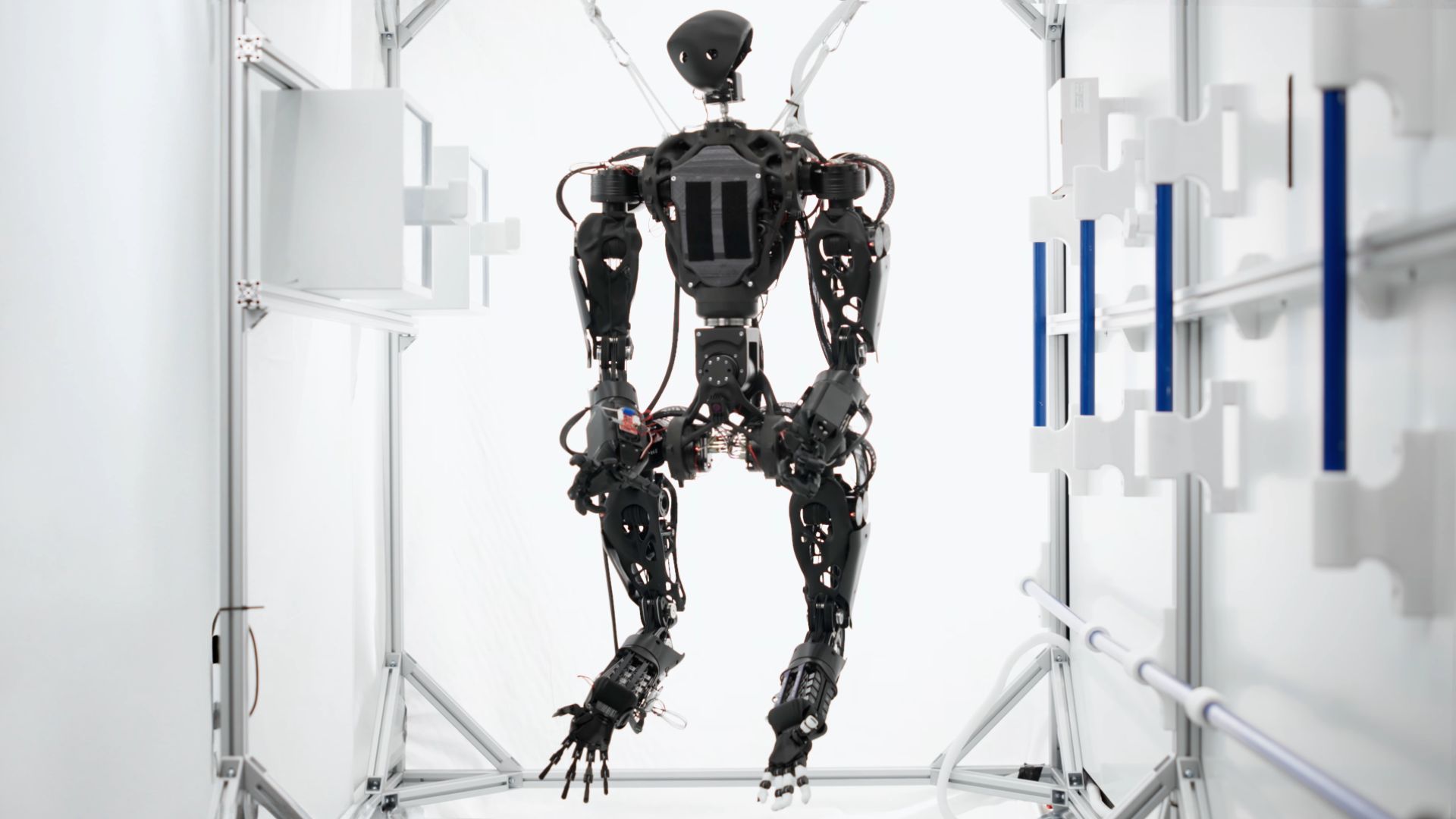
The economics of space operations are unforgiving, and Canadian startup Orbit Robotics just unveiled HELIOS—a four-armed humanoid robot that ditches legs entirely for microgravity operations. This isn’t your typical terrestrial humanoid; it’s purpose-built for environments where walking becomes irrelevant, and efficiency matters most.
Rethinking Humanoids for Zero-G Reality
Cable-driven architecture prioritizes dexterity over terrestrial walking capabilities.
While Earth-bound humanoids like Boston Dynamics’ Atlas perfect their parkour routines, HELIOS takes a fundamentally different approach. You won’t find heavy torque motors or rigid actuators here. Instead, Orbit reportedly built a lightweight skeletal chassis powered by tendon-driven cables and pulleys—like a marionette designed by aerospace engineers.
The four-arm configuration isn’t just showing off. In microgravity, movement relies on grabbing handholds and surfaces rather than walking. Those extra limbs theoretically mean HELIOS can anchor itself with two arms while manipulating cargo or equipment with the other two. Motors supposedly sit near the shoulders to reduce moving mass in the limbs, while rolling-contact elbow joints promise smooth motion without the backlash that plagues traditional hinged systems.
This design philosophy directly challenges the terrestrial humanoid playbook. Companies like Agility Robotics and Sanctuary AI optimize for warehouse floors and factory lines. HELIOS optimizes for floating through space stations, where your greatest asset isn’t balance—it’s the ability to multitask while staying put.
Targeting Astronaut Time, Not Replacement
Maintenance duties and cargo handling represent immediate deployment opportunities.
Orbit isn’t building a robot astronaut—they’re building a robotic assistant targeting specific operational inefficiencies. The company claims current crews spend significant time on maintenance tasks that could potentially be automated. HELIOS reportedly targets these repetitive duties:
- Inventory management
- Basic repairs
- The endless cycle of unpacking supply missions
The company’s IKARUS testbed allegedly demonstrates teleoperation and imitation learning capabilities, suggesting HELIOS might learn tasks by watching human operators rather than requiring complex programming. Think of it as motion capture for space work—astronauts demonstrate procedures once, and the robot handles routine repetitions.
Industry observers suggest that humanoid platforms make sense for human-designed environments. When your workplace has racks, handrails, and hatches built for human bodies, a human-shaped robot offers more flexibility than specialized arms like the ISS’s Canadarm2 or Dextre.
The real test isn’t whether four arms work better than two—it’s whether this approach can deliver meaningful cost savings before the next generation of space stations comes online. If orbital operations become as routine as promised, even modest automation could pay for itself quickly in space’s unforgiving economics with significant benefits for workplace safety.